メモ
ACL ロボットの詳細については、ACL ロボットのテーブルやファイルで作業するを参照してください。
HighBond ロボットまたはワークフローロボットでは、次の 2 種類のファイルで作業できます
-
作業ファイル
-
結果ファイル
| ファイルの種類 | データのカテゴリ | ロボットの場所 | 説明 |
|---|---|---|---|
| 作業ファイル | 作業データ |
[作業データ]領域には、次の 2 つのそれぞれの場所からアクセスできます。
|
作業ファイルはロボットでの一般的な入出力として使用され、ファイルを生成する特定のタスクまたはタスク実行に関連付けられていません。 作業ファイルは、手動または ACL ロボットを使用してアップロードすることもできます。 |
| 結果ファイル | リザルト データ | [タスクの実行]タブ |
結果ファイルは特定のタスク実行によって出力され、ファイルを生成するタスク実行に永久的に関連付けられています。 |
HighBond ロボットまたはワークフローロボットでのデータフロー
以下の図は、HighBond ロボットまたはワークフローロボットで可能なさまざまなデータフローと、それらがロボットに含まれるファイルにどのように関連するかを示しています。
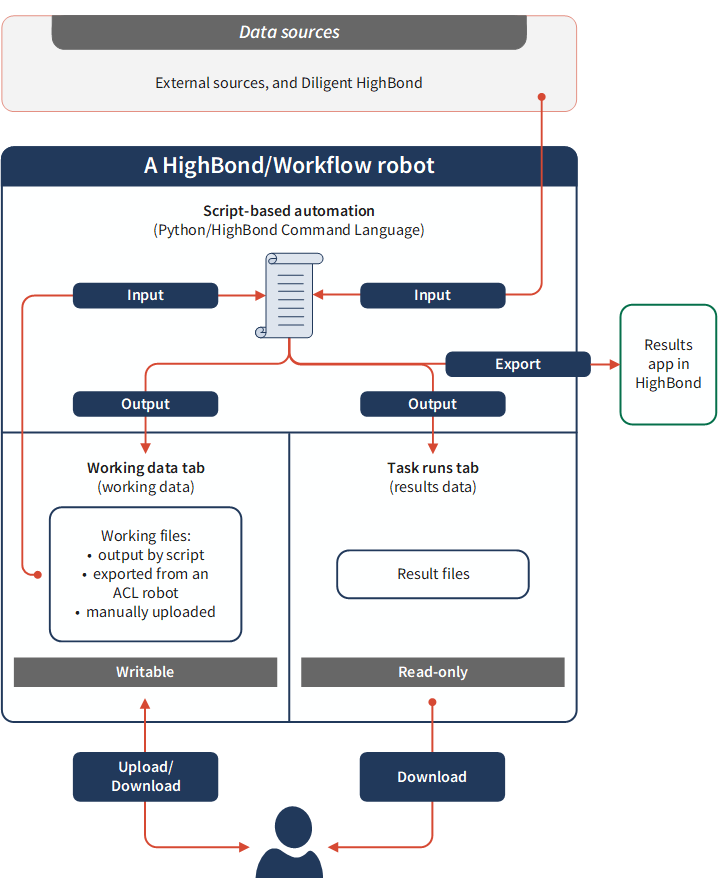
作業ファイル
作業ファイルは Python/HCL スクリプトで生成された ファイルであり、HighBond またはワークフロー ロボットの[作業データ]タブに保存されます。[作業データ]タブは、ロボットの中心的なデータ保存エリアです。
ロボットの[作業データ]領域には、ロボット ユーザー インターフェイスの次の 2 つのそれぞれの場所からアクセスできます。
-
作業データ タブ
-
スクリプト エディターの[作業データ]パネル
どちらの場所からでも、ロボットの同じ中央データ ストレージ領域にアクセスできます。一方の場所で実行したアクションは、他方の場所で自動的に同期されます。
作業ファイルにより、1 つのタスクからデータを出力し、後続のタスクで使用するためにこれを保持することができます。タスクは同じロボットでなければなりません。
ロボットの[作業データ]領域に作業ファイルをアップロードすることもできます–(手動または ACL ロボットを使用)。
作業ファイルは動的(書き込み可能)であり、後続のタスク実行で更新したり、後続のアップロードで上書きしたりできます。
作業ファイルを保存
Python/HCL スクリプトを使用して、作業ファイルを[作業データ]領域に保存するには、最初にスクリプト ロジックを使用してファイルを作成します。同じスクリプトで、次に HCL save_working_file() メソッドを使用してファイルを保存します。詳細については、「save_working_file() メソッド」を参照してください。
作業ファイルを手動でアップロードする
Excel や CSV などのファイルは、手動で [作業データ]タブにアップロードできます。手動でアップロードするファイルには、禁止されたマーチャントカテゴリコードのリスト、または従業員リストなどの静的データを含め、スクリプト化されたデータ分析の一部として入力できます作業ファイルを手動でアップロードする方法の詳細については、ロボットに保存されている作業データの管理を参照してください。
メモ
サポートされているファイル タイプのみを[作業データ]タブに手動でアップロードできます。
ACL ロボットを使用して作業ファイルをアップロードする
組織でオンプレミスのロボット エージェントを使用している場合、ACL ロボットを使用して、ローカルの Analytics テーブルのデータを[作業データ]タブの圧縮 CSV ファイル(*.csv.gz)にアップロードできます。この機能により、ローカルネットワークからクラウドベースのロボットインスタンスにデータを移動する、ACLScript-Python/HCL の統合データ自動化ワークフローを構築できます。
ACL ロボットを使用した作業ファイルのアップロードの詳細については、「Diligent One のロボット アプリへのデータのエクスポート」を参照してください。
既存の作業ファイルを読み込む
既存の作業ファイルタブをPython/HCL スクリプトへの入力として使用するには、まず HCL load_working_file() メソッドを使用して作業データ領域からファイルを読み込む必要があります。ファイルが読み込まれると、スクリプト論理の入力として使用できます。詳細については、「load_working_file() メソッド」を参照してください。
結果ファイル
結果ファイルは Python/HCL スクリプトで生成されたファイルであり、HighBond またはワークフロー ロボットの個別のタスク実行に保存されます。結果ファイルでは、特定のタスク実行から出力結果を保持できます。
結果ファイルは読み取り専用の最終成果物で、ダウンロードして表示できます。ロボットでは結果ファイルを更新できません。
結果ファイルを保存するには、最初に Python/HCL スクリプト ロジックを使用して、ファイルを生成します。その後、同じスクリプトで、HCL save_result_file()メソッドを使用して、ファイルを保存します。詳細については、「save_result_file() メソッド」を参照してください。
開発モードと本番モード
ロボットのタスクと、ロボットに含まれるすべての入出力データはモードによって分離されます。1 つのモードのデータ出力、または 1 つのモードで手動でアップロードされたデータ出力は、他のモードでは使用できません。詳細については、「ロボットの開発モードと本番モード」を参照してください。
ロボットスクリプト エディターでのファイル作業
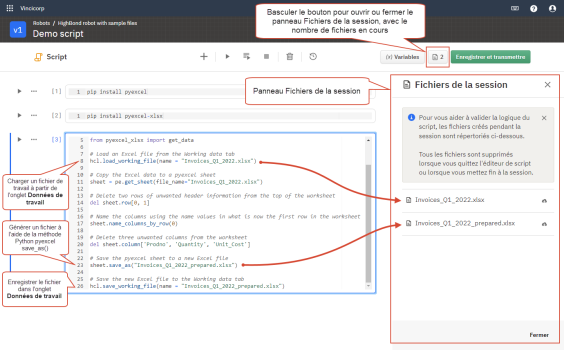
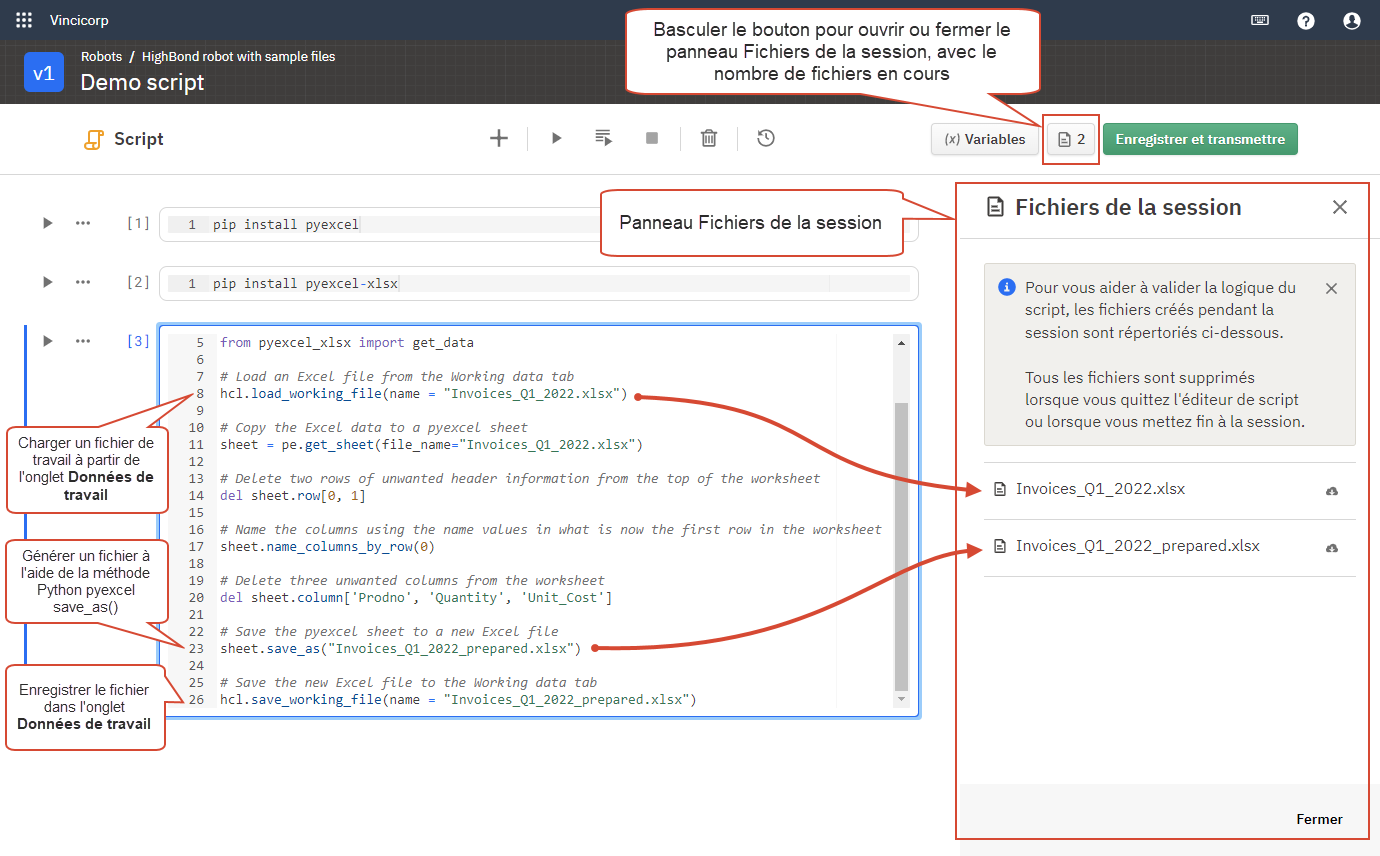
ロボットのスクリプト エディターで Python/HCL スクリプトを手動で実行すると、スクリプトによって作成された新しいファイルや、作業データ領域で読み込んだ既存のファイルがセッションファイルパネルで利用可能になります。セッションファイルパネルを開き、個々のファイル一覧を表示し、必要に応じてファイルをコンピューターにダウンロードできます。読み込まれた作業ファイルは、実際のソースファイルではなく、コピーとなります。
セッションファイルパネルに表示されるファイルの例
下記の例では、セッションファイルパネルにはファイルが2つ含まれています。
-
Invoices_Q1_2022.xlsxは、作業データ領域からHCL load_working_file()メソッドによって読み込まれた Excel ファイルです。
-
Invoices_Q1_2022_prepared.xlsxは、Python pyexcelライブラリからのメソッドを用いて準備そして保存されたファイルの新バージョンです。その後、ファイルは作業データ領域にHCL save_working_file()メソッドを用いて保存されます。
メモ
ここでは、Python pyexcel ライブラリを一例として使用しています。いずれのタイプの Python スクリプトによるいずれのタイプのファイルも、セッションファイルパネルで利用可能になります。
セッションファイルのメリット
セッションファイルは、Python/HCL スクリプトの自動化を開発する際に役立つため提供されています。
-
スクリプトによって作成された、または読み込まれた実際のファイルを見ることができるため、スクリプトのロジックを検証するのに役立ちます。
-
個々のファイルをダウンロードして、その形式と内容をレビューし、期待に沿うものであるかどうかを検証できます。
-
スクリプトの新バージョンを保存する前に、すべてのファイル操作と関連するスクリプトロジックを確認し、必要な調整を行うことができるため、通常、スクリプト開発中に作成するスクリプトバージョンの数を減らすことができます。
セッションファイルの継続時間
セッションファイルは、セッションメモリに保持される一時的なコピーで、保持されるのはセッションの間のみです。そのため、スクリプト エディターを終了するか、セッションを終了すると、自動的に削除されます。
スクリプトがファイルをsave_working_file() メソッドまたはsave_result_file() メソッドを用いて保存する場合、ファイルの無期限のコピーが作業ファイルまたは結果ファイルとして保存されます。テンポラリーセッションコピーが削除されたら、作業データ領域から読み込まれた既存の作業ファイルは影響を受けません。
HighBond ロボットまたはワークフローロボットのファイルを表示する
HighBond ロボットやワークフローロボットに含まれる作業ファイルや結果ファイルを見るには、まずそれらをローカルコンピュータにダウンロードする必要があります。
作業ファイルをダウンロードする
-
Launchpad ホームページ (www.highbond.com) からロボット アプリを選択して開きます。
すでに Diligent One を使用している場合は、左側のナビゲーション メニューを使用してロボット アプリに切り替えることができます。
- ロボットのダッシュボードから、該当するロボットの種類のタブを選択します。
- 作業ファイルが含まれるロボットに移動し、そのロボットを選択して開きます。
-
ロボットの右上隅で、[本番]または[開発]をクリックして、使用するモードを選択します。
詳細については、「ロボットの開発モードと本番モード」を参照してください。
- 作業データタブを選択します。
メモ
スクリプト エディターの[作業データ]パネルからもファイルをダウンロードできます。
- ダウンロードする作業ファイルを選択します。
- [ファイルの詳細]パネルで、[ダウンロード]をクリックします。
結果 ファイルはローカル ファイル システムにダウンロードされ、ネイティブ アプリケーションで開くことができます。
結果ファイルをダウンロードする
-
Launchpad ホームページ (www.highbond.com) からロボット アプリを選択して開きます。
すでに Diligent One を使用している場合は、左側のナビゲーション メニューを使用してロボット アプリに切り替えることができます。
- ロボットのダッシュボードから、該当するロボットの種類のタブを選択します。
- 結果ファイルが含まれるロボットに移動し、そのロボットを選択して開きます。
-
ロボットの右上隅で、[本番]または[開発]をクリックして、使用するモードを選択します。
詳細については、「ロボットの開発モードと本番モード」を参照してください。
メモ
ワークフローロボットは、開発モードのタスクと結果をサポートしていません。
- [タスクの実行]タブを選択します。
- ダウンロードする結果のタスク実行を選択します。
- 出力のタスクの実行詳細パネルで、ダウンロードしたいファイル名横のダウンロードをクリックします。
結果 ファイルはローカル ファイル システムにダウンロードされ、ネイティブ アプリケーションで開くことができます。
